V-T-diagram
Syfte:
Syftet är att undersöka kopplingen mellan s-t-diagram
(läge-tid-diagram) och v-t-diagram ( hastighet-tid.diagram). Samt undersöka
olika samband mellan dessa diagram.
Mål:
·
Registrera en vagns rörelse i synkroniserade
s-t-diagram och v-t-diagram.
·
Avläsa ur och förklara sambandet mellan värden i
s-t- repsekttive v-t- diagrammet och bestämma hur dessa i sin tur hänger ihop
med vagnens verkliga rörelse.
·
Bestämma och tolka arean under v-t-grafen.
Material:
Under undersökningen användes dator med PASCO capstone
program, vagn, med vagnbana (2 m), rörelsesensor, ett usb pasport mellan
sensorn och datorn.
Utförande:
Vi ställde upp banan på en overhead för att få en lutning så
att vi kunde få en acceleration på vägen ner (se tidigare inlägg andragradsfunktionen).
Sensorn ställde vi i ”början” på banan (den delen som är i botten). Sedan
puttades vagnen upp för banan samtidigt som pasco programmet och sensorn
fångade upp vagnens rörelse och överförde detta i ett diagram samtidigt som
hela rörelsen filmades.
Resultat:
I tabellerna nedan kan vi avläsa, tiden (s), läget (m) och
hastigheten (m/s). Alla dessa är synkroniserade så att vid tex vid mätvärde 41
hade det gått 2,000 sekunder (s), vagnen var då 1.83 meter ifrån sensorn och
hade en hastighet på 0,27 m/s. Vid ett mätvärde 51 hade vi en negativ
hastighet, -0,46 m/s, positionen var 1,77 meter ifrån sensorn och det hade gått
2.500 sekunder sedan mätningarna startade. Om vi jämför 41 0ch 51 kan vi se att
vagnen var närmare sensorn i 51 trots att det hade gått längre tid, detta
indikerar att vagnen är på väg tillbaka mot sensorn. Hastigheten blir negativ
eftersom att vagnen rör sig mot den förutbestämda positiva riktningen som är
från sensorn, när vagnen rör sig mot sensorn rör det
sig i negativ riktning och hastigheten
blir likaså negativ.
Vändpunkten hittar vi lätt i tabellen, det är det ställe så
hastigheten är negativ och där avståndet från sensorn minskar. När vagnen
vänder står den still i några delar var en sekund. Vi kan se att från 2,100
sekunder till 2.250 sekunder befinner sig vagnen hela tiden på 1.85 meter ifrån
sensorn. Samtidigt minskar hastigheten
hela tiden ovh vid det mittersta värdet står det still, 0,03 m/s.

Tabellerna visar en
vagns rörelse i tid, läge och hastighet.
För att få reda på hur långt vagnen färdades beräknar man arean under v-t-grafen.

På bilden ser vi v-t-grafen
under det första tidsintervallet, innan den har nått vändpunkten. Arean under
grafen är markerad, arean under får vi som förflyttningen.
Av PASCO capstone får vi att arean under grafen är 1.33 m/s*s.
Detta medför att förflyttningen 1.33 m.
m/s*s= (m*s)/s= (m*s)/s = m/1 = m
Först flyttar vi upp s
och multiplicerar den med m, genom att s står ovanför bråkstrecket blir det
lättare att se att vi kan stryka s mot s, detta visas steg 3. När vi stryker
ett tal finns alltid 1 kvar. Detta betyder att vi delar m på 1 vilket är samma
sak som m.
1,33 m/s*s = 1.33 m’
Beviset ovan styrker
att vi kan för korta m/s*s till m.

På bilden ser vi samma
förflyttning som på bilden ovan, men här ser vi även s-t-diagramet.
Vi kan se att vi får samma värden i de båda graferna.
I den blåa får i ta Δ s (”delta s”), det betyder att vi
subtraherar läge 2 från läge 1.
S1 = 0.850 s och 0.52m
S2= 2,200 s och 1,85 m
Δs = 1,85- 0,52 = 1.33 m.
Vi fick samma resultat av att beräkna Δs och
att ta arean under v-t-grafen.
I uträkningen ovan ser vi att det går att stryka s mot s i
enheten och att vi får m kvar ensamt, m står för läget. Detta ger oss att vagnen färdades 1.33 m innan
de vände och åkte neråt.
Vi kan beräkna förflyttning på vägen tillbaka på samma sätt,
men då får vi arean mellan x-axeln och grafen.

På bilden ser vi
förflyttningen för vagnen efter vändpunkten.
-1.55 m/s*s = -1.55 m

På bilden ser vi arean
under v-t.grafen synkad med s-t-diagram.
Vi kan se att vi får samma värden i de båda graferna.
I den blåa får i ta Δ s (”delta s”), det betyder att vi
subtraherar läge 2 från läge 1.
S1 = 2.150s och 1,85m
S2= 3.650 s och 0.30 m
Δs = 0.30- 1,85 =-1.55m.
Vi fick samma resultat av att beräkna Δs och
att ta arean under v-t-grafen.
Av beviset ovan vet i att arean under grafen är
förflyttningen. Att vi har en större förflyttning efter vändpunkten än innan
kan bero på att vi stannade vagnen närmare sensorn är vad vi startade den.
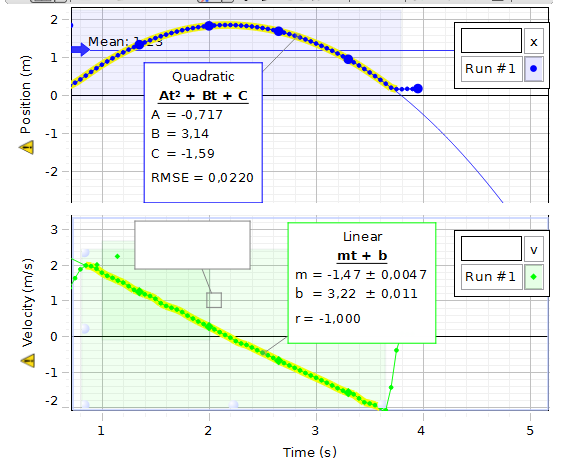
På bilden ser vi de båda graferna med sina ekvationer.
I koordinatsystemen ovan visas grafen för vagnen rörelse,
blå graf, och grafen för vagnens hastighet, den gröna.
Nollpunkter 3.68 och 0.51. Nollpunkterna visar när vagnen är
bredvid sensorn. Eftersom att vi startade vagnen framför och stannade vagnen
framför, är dessa värden inte kopplade till verkligheten. Likaså alla värden
bakom nollpunkterna, de är bara matematikens beskrivning av hur verkligheten skulle
ha sett ut om vi lät vagnen fortsätta i all evighet. Detta skulle
inte fungera eftersom att den energin vi puttade på bilen med inte är med som
en faktor i matematikens värld. Energin hade inte räckt till att putta upp vagnen
för en oändlig backe. Här har matematiken en begränsning, den tar inte hänsyn
till alla faktorer i verkligheten som spelar in när man gör en mätning som
denna.
Inga kommentarer:
Skicka en kommentar